点云与计算机视觉
在前面了解了什么是点云之后,小编接下来将会介绍点云与计算机视觉的相关知识,话不多说,咱们开始吧!
01 点云的预处理
根据任务的需求,点云处理也存在不同层次的处理⽅式,需要组合不同的处理⽅式,⽽这些处理在过程上有先后之分。按照功能和处理方式不同,将点云图像处理分为以下三个层次:
(1)低层次包括图像强化,滤波,边缘检测等基本操作;
(2)中层次包括连通域标记,图像分割等操作;
(3)⾼层次包括物体识别和场景分析等操作。
⼯程中的任务往往需要⽤到多个层次的图像处理⼿段,在传统的图像处理⽅法中(传统就是不包括CNN神经⽹络和⼤数据集),图像处理的过程需要递增的使⽤不同层次图像处理来完成任务。
02 三维语义分割
三维点云语义分割是指通过将原始点云数据划分成若干区域,按照相关的功能定义对相同属性和不同属性的数据点进行分割,并用标签标记被分割的区域,从而得到每个三维点的语义类别。
三维点云的语义分割技术在计算机视觉、语音识别、人脸识别、全息成像、生物医学分割、自动驾驶汽车等领域上得到了广泛的应用。但是由于点云数据的物体对象形状多样性、密度不均匀性和采样不规则性等特点,使得在三维空间中数据点的分布非常不均匀,不同物体之间可能存在着相互遮挡,匹配信息可能会出现错误,这些都将直接影响语义分割方法的准确性,阻碍了智能包装、智能自动驾驶技术等应用场景前进的步伐。
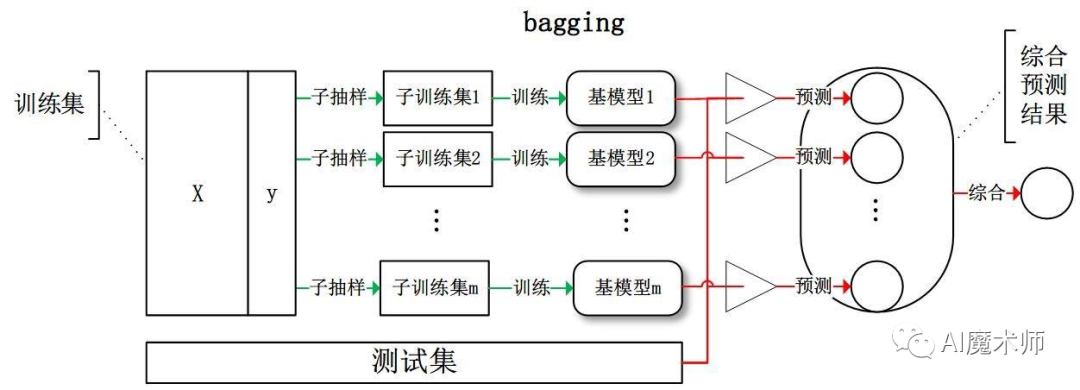
基于深度学习技术的三维点云语义分割方法按数据的表现形式可分为间接基于点云的方法(包括基于投影的方法、基于体素的方法、基于多视图的方法)和直接基于点云的方法(如下图所示)。其中,间接方法是一种将不规则点云转化为规则结构,然后输入到网络中进行分割的方法。该类方法可以很好地弥补卷积神经网络(Convolutional·Neural·Network,CNN)不能应用在点云的缺陷,但在转换的过程中会不可避免丢失一些重要的信息特征。而直接方法则是一种不需要转换形式,直接将点云输入到网络中实现分割的方法。该类方法能够充分利用点云数据的特性,降低网络计算的复杂度,提高语义分割的精度。

03 三维目标检测
基于深度学习理论的激光点云3D目标检测算法可大致可分为以下两类:
一类是基于体素(Voxel-based)的特征提取算法。基于体素的算法一般将非结构化数据的点云转化为3D体素或转化到二维(2D)俯视图网格上,通常用3D稀疏卷积或2D卷积提取特征,计算效率较高,但点云的体素化及3D稀疏卷积的下采样会损失原始点云的3D空间信息,导致基于体素的算法检测精度有所下降。
另一类是基于原始点云(Point-based)的特征提取算法。基于原始点云的算法利用点云网络(PointNet)或其变体直接从原始点云中提取特征,未对点云进行体素化及卷积下采样,因此,保留了原始点云的高精度3D空间位置信息;且基于原始点云的算法通过设置特征提取层(Point set abstraction)的聚合半径可以灵活设置感受野,从而实现较高的检测精度。
04 三维实例分割
基于深度学习技术的实例分割方法以先检测再分割法为主,同时,也有少量对先标记像素再聚类法以及密集滑动窗口法的研究,下面将分别对其进行介绍。
(1)先检测再分割法
实例分割任务既需要完成目标检测中对个体的区分任务,也需要实现语义分割中像素级别的标签预测。因此,基于其需要达成的两个任务,出现了大量先检测后分割的研究方法。其需要在网络中先完成目标检测任务,然后针对目标检测任务输出的每一个边界框进行语义分割来区分前景与背景,最终给出像素级别的实例掩膜。
(2)先标记像素再聚类法
先标记像素然后聚类的方法首先将图像各个像素打上语义标签,之后再通过聚类算法将不同实例的像素点分开。
(3)密集滑动窗口法
密集滑动窗口法,是使用滑动窗口在图像上进行分割的技术,类似于目标检测中的滑动窗口法。
05 三维点云与三维点云配准
三维点云与三维点云的配准过程,就是求两个点云之间的一个旋转平移矩阵,源点云通过旋转平移矩阵后,变换成和目标点云矩阵相同的矩阵,如图所示。

三维点云与三维点云的配准过程可以表示为以下方程:
pt=R*ps+T
其中pt,ps,分别是目标点云和源点云中的一对对应点。
R,T就是我们要求的旋转平移矩阵。
但是,我们并不知道两个点云中,点与点之间的对应关系,这也是配准的核心问题。
三维点云与三维点云配准分为粗配准与精配准两步。
粗配准就是在完全不清楚两个点云的相对位置关系的情况下,找到一个这两个点云近似的旋转平移矩阵(不一定很精确,但是已经大概是对的了)。
精配准就是在已知一个旋转平移矩阵的初值的情况下(这个初值大概已经是正确的了),进一步计算得到更加精确的旋转平移矩阵。
三维点云与三维点云配准的算法会在后续的推文中详细介绍哦!
06 二维图像与三维点云配准
虽然三维点云与三维点云的配准精度较高, 但由于在三维下搜索特征点, 其运算时间长。相比于点云配准, 二维图像的配准方法相对成熟, 特别是特征提取算法已经取得很好的研究, 对光照变换、局部遮挡、尺度变换有很强的鲁棒性。因此, 利用图像成熟配准方法完成点云初配, 为点云配准技术提供了一条新的思路。
二维图像与三维点云配准的基本思路如下所示:
(1)把不同分辨率的点云均匀重采样, 再根据点云深度值把三维点云转化成二维图像, 建立点云和图像之间的一一映射关系;
(2)完成二维图像中特征提取和匹配, 并剔除错误特征匹配点对;
(3)根据点云和图像的映射关系, 将二维图像中的特征点对映射到三维点云中, 获取了点云的特征点对;
(4)利用旋转矩阵计算方法完成点云的初始配准。
07 总结
在本文中,小编向大家介绍了多个基础计算机视觉任务中的点云应用,点云的魅力远不止此,后续我们还将继续为大家讲解更多点云的高级应用,敬请期待!
点赞、分享是小编继续更新文章的动力,小编期待您的支持!^_^!
-The End-
文案:葛俊杰
指导老师:曹菁菁 赵强伟
排版:余凌峰