第一篇:认识点云
Hello各位小伙伴,这是点云系列的第一篇“认识点云”。那么到底什么是点云呢?我们一起来探索吧!
点云是什么?
简单来说,点云就是一堆点。点云是某个坐标系下的点的数据集,它就像夜晚的星空一样有万点繁星,每一个星星就是一个点,每个点都包含了丰富的信息,包括三维坐标、颜色、分类值、强度值等。
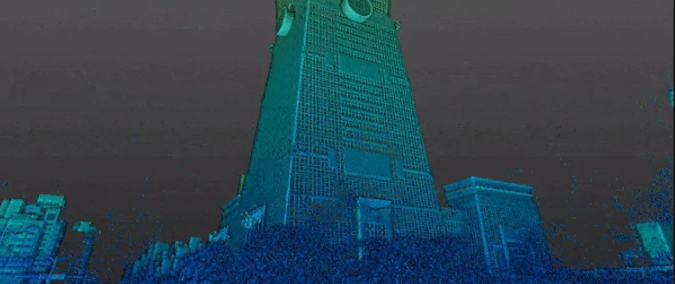
以下是利用Trimble SX10扫描的台北101大楼点云:
在了解了点云的基本概念之后,小编接下来从点云数据的采集设备、点云数据的信息形式、点云数据的应用领域、点云数据的优点以及点云数据的缺点这五个方面来更详细地介绍点云。大家跟随小编的思路,开始认识点云吧!
1.点云数据如何采集?
根据采集原理的不同,点云采集设备可分为二维采集设备和三维采集设备。
常用的二维采集设备有扫描枪、线扫描相机。
扫描枪
扫描枪作为光学、机械、电子、软件应用等技术紧密结合的高科技产品,是继键盘和鼠标之后的第三代主要的电脑输入设备。扫描枪自80年代诞生之后,得到了迅猛的发展和广泛的应用,从最直接的图片、照片、胶片到各类图纸图形以及文稿资料都可以用扫描枪输入到计算机中,进而实现对这些图像信息的处理、管理、使用、存储或输出。

扫描枪也叫条码扫描枪,它是读码器的一种类型,它能够读取条码标签里储存的数据,然后上传到计算机条码系统,让使用者得到想要的数据。条码扫描枪一般用于商超收银,工业生产、医疗、物流快递等。
扫描枪的使用非常灵活。条码标识既可以作为一种识别手段单独使用,也可以和有关识别设备组成一个系统实现自动化识别,还可以和其他控制设备联接起来实现自动化管理。另外,扫描枪具有易于制作,对设备和材料没有特殊要求,识别设备操作容易等优点。
线扫描相机
线扫描相机包含单行像素,其通过逐个像素线构建最终的2D图像。构建线扫描图像需要相机与物体之间保持相对运动,通常为沿着输送带或旋转轴运动。当物体移动经过相机面前时,相机将采集一个新的像素线。视觉处理器或图像采集卡上的软件将存储每个像素线,然后将像素数据重新构建为最终的2D图像。

这种独特的图像采集过程擅长于采集输送带上快速移动的离散元件的图像,检测柱形物体的所有侧面,以及构建超大物体的图像。文件扫描仪、复印机和传真机等将文件扫描到存储器中的商用设备采用线扫描技术,制造和物流领域的生产线和分销线也是如此,它们依靠这种特殊技术快速采集高分辨率图像,用于执行复杂元件的检测。
常用的三维采集设备有深度相机、激光雷达。
深度相机
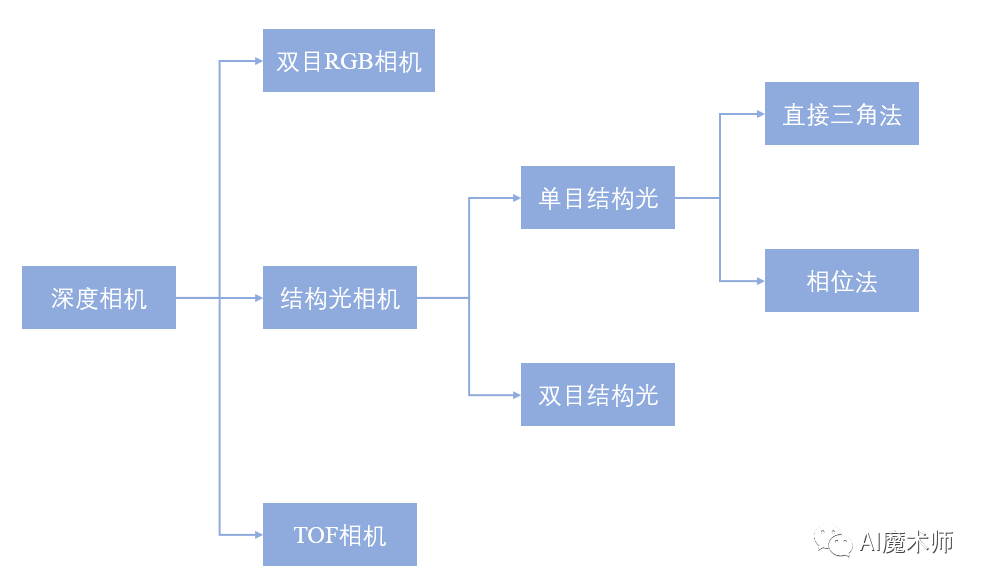
深度相机(也叫3D相机)就像机器人的眼睛,能检测出空间物体的景深距离,进而获取到物体上每个点距离摄像头的距离远近,然后再叠加该点在 2D 图像中的二维坐标后,就能获取图像中每个点的三维空间坐标。

小编把深度相机的具体类型做了个简单总结,见下图:
激光雷达
激光雷达生成点云数据的原理类似于声纳,只不过这里用光代替了声音,来衡量激光雷达与障碍物之间的距离。主要工作原理是向目标发射激光束(单线/多线),然后将反射信号与发射信号比较,分析信号的折返时间(TOF)或频率差(多普勒频移),即可获得目标距离等相关参数。
激光是大量原子受激辐射所产生的发光行为,激光在传播中始终像一条笔直的细线,发散的角度极小。
如果一个激光雷达能够在同一个空间内,按照设定好的角度发射无数条激光,就能得到无数基于障碍物的反射信号。比如一条线速激光通过一个平面反射的障碍物信息,将得到一个平面地图;多条激光线束通过不同平面反射的障碍物信息,将得到一个完整三维图像。
2.点云数据是什么样子的?
由于拍摄设备和拍摄原理的不同,最终得到的点云数据信息形式也是不同的。
根据激光测量原理拍摄得到的点云数据,包含三维坐标(XYZ)和激光反射强度(Intensity);
根据摄影测量原理拍摄得到的点云数据,包含三维坐标(XYZ)和颜色信息(RGB);
结合激光测量和摄影测量原理拍摄得到点云数据,包含三维坐标(XYZ)、激光反射强度(intensity)和颜色信息(RGB);
深度像机拍摄得到的点云数据,也就是常说的深度图(Depth Map),相比普通的RGB图像会多一维“深度”的信息;
点云数据一般是下列属性的排列组合:
1) x、y、z:点云的空间坐标。
2) i:强度值,强度反应了点的密集成度。
3) r、g、b:rgb色彩信息。
4) a:a代表alpha(透明度)。
5) nx、ny、nz:n代表Normal,点云的法向量。
3.点云的应用领域有哪些?
点云数据广泛应用于测绘、交通、电力、林业、地质等行业。
1) 1:500 大比例尺数字线画图生产

2) DEM生产

3) 高精度导航地图生产

4) 树木提取和垂直结构参数计算

5) 地质数据成像

6) 无人机电力巡检

7) 基于高精度地图的无人驾驶

8) 太阳能利用率分析

4.点云数据有啥优点呢?
1)点云数据的采集效率较高
点云采集设备的采集性能非常好,而且价格实惠。
2)可以提供更多的维度信息
点云数据可以提供丰富的几何、形状和比例信息;与二维图像相辅相成,点云数据提供了一个以更好地了解机器周围的环境的机会,保留了原始的几何信息在三维空间中,不需要任何离散化。
3)与人工智能技术紧密结合
点云数据与深度学习的结合越来越紧密,已经成为人工智能领域处理3维视觉问题的最常用数据格式。
4)数学表示简洁
以数学方式表达点云数据时十分简洁,例如:
- 灰度像素点云数据:X1,Y1,Z1,灰度值1;
- 彩色点云数据:X2,Y2,Z2,r2,g2,b2。
5.别忘记点云数据的缺点!
1)点云具有无序性
受采集设备以及坐标系影响,同一个物体使用不同的设备或者位置扫描,三维点的排列顺序千差万别,这样的数据很难直接通过End2End的模型处理。
2)点云具有稀疏性
在机器人和自动驾驶的场景中,激光雷达的采样点覆盖相对于场景的尺度来讲,具有很强的稀疏性。在KITTI数据集中,如果把原始的激光雷达点云投影到对应的彩色图像上,大概只有3%的像素才有对应的雷达点。这种极强的稀疏性让基于点云的高层语义感知变得尤其困难。
3)点云信息量有限
点云的数据结构就是一些三维空间的点坐标构成的点集,本质是对三维世界几何形状的低分辨率重采样,因此只能提供片面的几何信息。
-The End-
文案:葛俊杰
指导老师:曹菁菁 赵强伟
排版:黄雅文 王雪